
皆さんこんにちは!いつもご覧いただきありがとうございます😊
最近食中毒にかかって神に祈ってしまうほど辛い思いをしたHP担当の石田です!
さて、今週のテーマは研究紹介でございます!すでにHPには先生が書かれた専門的な研究内容紹介がありますので、この「研究紹介」というくくりではテーマごとに学生にインタビューする形でざっくり、わかりやす~く解説をしていきたいと思います!👍
一般の方には岡本研究室の研究概要を、そして後輩学生さんには岡本研究室選びの参考にしていただければと思います!😊
今回はトップバッターということで私石田の「屋内位置推定の基礎」をご紹介したいと思います。
他のメンバーにならばインタビューできますが、自分自身にインタビューするのはちょっと痛々しい気がしますので、今回は普通にご説明していきますよ~
チャプターは以下のとおりです!
- 研究の背景
- 位置推定ってどうやるの?
- 現在の課題とその解決策は?
- まとめ
- 参考文献
研究の背景
位置情報と聞くと、皆さんはどんなことを思い浮かべるでしょうか?
きっと多くの人がGoogle マップを想像したことと思います。このGoogleマップは人工衛星から得たデータを使ってスマートフォン等の端末の位置を推定することで現在位置を得ています。カーナビなども同じ原理ですね~。👌
しかし、屋内や地下に入ると自分の位置を示すポインターがぐるぐる回ったり、あるいは全然自分のいる位置と違ったところにポインターがあったり、、、なんていう経験が皆さんにも1度や2度はきっとあるはずです。
実はこれらは地下や屋内では土や屋根によって電波が遮られるためにGPSが機能しなくなってしまうことが原因です。
このように、これまで屋内での位置情報は正確性に欠けるところがありました。
しかし、人間というのは一般的に屋内環境で90%の時間を過ごすといわれています。ですから、間違いなく屋内での高精度な位置情報というのは需要があるわけですね。
実は現在、これと言ってスタンダードな屋内位置推定の技術は定められておらず、研究者たちが日々凌ぎを削ってそのスタンダードを勝ち取ろうとしています。
現在は一般的な家庭やオフィスに広く普及しているWi-FiやBluetoothなどの規格の電波を用いる手法が多く検討されていますが、その中でも我々が着目しているのがUWB(Ultra Wide Band)という超広帯域の電波です。位置推定の原理は一般的にターゲットとセンサの間の距離を測定し、その情報をもとに行われます。UWBは電波の周期が非常に細かいため、高い精度で距離を測ることが可能なのです。
ここからはその仕組みを簡単に、そして現在の技術課題とその対策をご紹介します!
位置推定ってどうやるの?
位置推定には本当にいろいろな仕組みがあるのですが、代表的な方法に三角測量というものがあります。これは位置があらかじめわかっているセンサと位置がわからなくて知りたいターゲットの距離を測定することで位置を推定する方法です。
まず、センサから発射した電波がターゲットに届くまでの時間を計測することで2点間の距離を計測します。この情報から、ターゲットはセンサを中心とする、半径が測定距離の円上のどこかに存在しているということが分かりますね。この情報を他のセンサについても行うとどうなるでしょう?
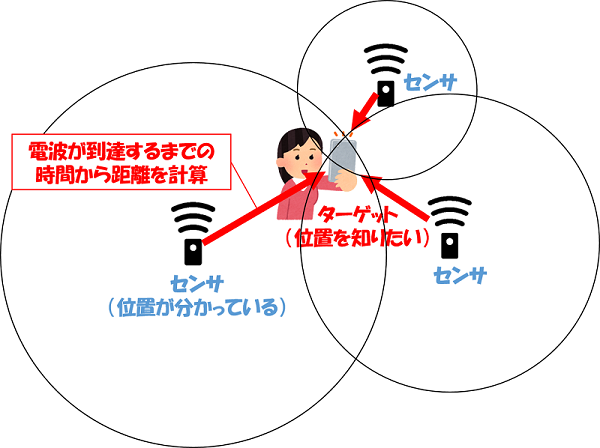 【三角測量】
【三角測量】
ご覧の通り、誤差は多少あれど円の交点がターゲットの位置とおおよそ一致するのです。
この原理は広く利用されており、GPSもこの原理を用いています。
さて、ここからは少し発展的な内容を…。
現在の課題とその解決策は?
勘のいい方はすでにお気づきかもしれませんが、屋内位置推定が行われる地下街やオフィスの中に誰もいなくて電波が通り放題の環境なんて存在しません。
人であったり、家具、機材などの障害物があって当たり前なのです!
そうすると、電波が遮られて正しく距離を測定できなくなってしまうのです。
この誤ったデータを使って位置推定するとどうなるか…?
想像に難くないですね。もちろん推定精度はがた落ちです…(泣)
私は特にこのような問題を取り扱っています。いわば嘘つきが混じった情報を使っていかに正確な結果を導くか…!あなたならどうしますか?
【イメージ】
もちろんすでにいろいろな方法が提案されていますが、例えばこんな方法があります!
ここではたとえとしてセンサを人とし、その人の証言を測定距離としましょう。障害物のない環境で測定を行ったセンサは正しい証言を行った人、障害物がある環境で測定を行ったセンサはうその証言を行う人、ということになりますね!
まず、たくさんいる人の中から3人を連れてきます。そして話し合いをしてもらいます。これを他の3人の組み合わせでも行っていきます。すると、正しい証言を行っている人のみが集まったグループでは当然つじつまが合いますが、うその証言をしている人が含まれるグループでは話のつじつまがどうも合わなくなりますね。そりゃもちろん誰かが嘘ついているわけですから…!
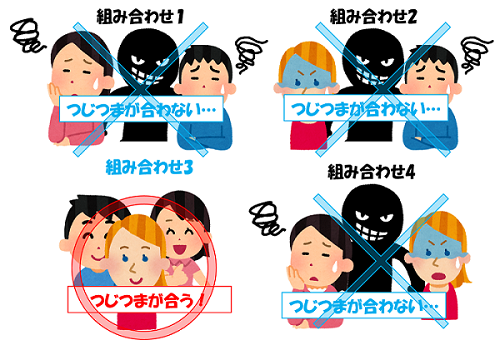
【イメージ2】
この状況を位置推定に置き換えるならば、センサを様々に組み替えて位置推定を行うと、推定結果と測定値の乖離が小さい(つじつまが合う)組み合わせが正しい結果を得ている可能性が高いということになります!
たとえ話がしっくり来たかはわかりませんが、こんな形で難しい問題も解決していけるわけです!
このようにどんな環境にも対応できる屋内位置情報サービスが確立すれば、工場における自動ロボットの整備、医療機関での人員配置の最適化、スーパーなどでのキャッシュレス決済…などなど、様々な用途への応用が期待できます!
詳しい内容に興味を持ってくださった方は、ぜひ下の「参考文献」もご覧ください👌
まとめ
今日も最後までお付き合いいただきありがとうございます!
今回は研究紹介の皮切りとして筆者自身の研究テーマについて述べさせていただきました!
自分の研究分野ということで熱が入ってしましましたが果たして皆様に楽しんでいただけているでしょうか…!非常に不安です笑😂
毎回こういった堅苦しい話も何なので、まじめな話と砕けた話、なるべく交互に挙げていけたらなと思っております!
最後にはなりましたが、今日のお話は1ミリもわかっていただけなくても大丈夫なのでこれだけはわかってください…。
「食中毒にはどうか気を付けて…。」
それでは今日はこの辺で..😉
参考文献
[1] Chia-Chin Chong, Ismail Guvenc, 渡辺富士雄, 稲村浩, “屋内位置情報サービスを実現するUWBを用いた測距・測位技術, ” NTT docomoテクニカル・ジャーナル, vol. 17, no. 1, Apr. 2009.
[2] 石田圭吾, 岡本英二, 李還幇, ”機械学習を用いた推定位置分布解析に基づくNLOS環境におけるロバストな屋内位置推定法の検討, ” 2020年信学総大, B-15-38, Mar. 2020.
[3] 堀場慎人, 岡本英二, 篠原敏子, 松村克彦, ”統計性質を活用した高精度NLOS判別法の提案,” 信学会2015年総合大会, B-5-125, Mar. 2015.
ピンバック: 未来へと続くバトン | 岡本英二研究室