こんにちは!
2026年度ブログ担当の藤山です 😊
今回は,私たちの研究室の3つの研究チームについて紹介します!
先日,B4の後輩たちと話している中で,
「研究テーマやチームはどのように決まるのか」
「各チームではどのような研究をしているのか」
「自分にはどのチームが向いているのか」
といったことに興味を持ってくれている様子がありました.
そこで今回は,各チームの代表にアンケート形式で答えてもらい,その回答をもとに生成AIさんにも手伝ってもらいながら,暗号チーム,モビリティチーム,AI/MLチームの3つの研究チームについて紹介していきます!🎤
研究内容だけでなく,各チームの特徴や向いている人についても聞いてみたので,
これから研究を始めるB4の皆さんや,将来本研究室に興味を持ってくれる方にとって,少しでも参考になれば嬉しいです!
Q1. 研究チームはどうやって決まりますか?
A. 研究チームは,基本的には研究テーマに応じて決まります.
例外はありますが,基礎ゼミが終わった後,夏季休暇前の時期に,岡本先生とM2の学生でB4向けの研究テーマについて話し合います.
その後,複数の研究テーマをB4の皆さんに提示し,B4同士で相談しながら,自分が取り組みたいテーマを決めていく形になっています.
そして,決まった研究テーマの内容に応じて,暗号チーム,モビリティチーム,AI/MLチームのいずれかに所属します.
そのため,最初から「このチームに入る!」と決めるというよりは,興味のある研究テーマを選び,そのテーマに適したチームで研究を進めるという流れです.

Q2. 暗号チームではどんな研究をしていますか?
A. 暗号チームでは,主に秘匿性の高い通信に関する研究をしています.
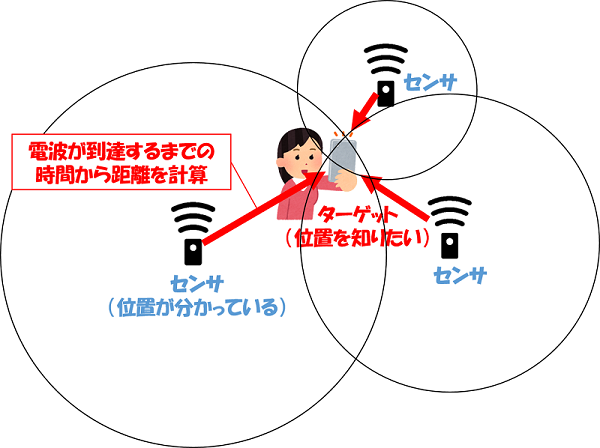
無線通信では,電波を使って情報を送るため,第三者に盗聴されたり,なりすまされたりする可能性があります.
暗号チームでは,そのようなリスクに対して,より安全に通信するための方法を考えています.
簡単に言うと,
「正しい相手にはちゃんと届くけど,第三者には分かりにくい通信」
を目指すチームです.
Q3. 暗号チームの特徴は何ですか?
A. 暗号チームの特徴は,通信性能と安全性のバランスを考えるところです.
ただ信号を分かりにくくすればよいわけではなく,
「ちゃんと通信できるのか」
「どれくらい安全なのか」
「計算量は大丈夫なのか」
といったことも考える必要があります.
そのため,理論を考えたり,シミュレーションを回したり,グラフを見ながら一喜一憂したりします.
また,普段から秘匿性の高い会話を心がけているため,たまに何を話しているのか分からないことがあります.
これもセキュリティ対策の一環……かもしれません.
Q4. 暗号チームに向いている人は?
A. 暗号チームは,次のような人に向いていると思います.
・セキュリティや暗号に興味がある人
・無線通信の仕組みに興味がある人
・数式やシミュレーションに抵抗がない人
・コツコツ考えるのが好きな人
・秘密を墓場まで持っていける人
暗号と聞くと難しそうに感じるかもしれませんが,最初から全部分かっている必要はありません.
少しずつ理解していけば大丈夫です.
Q5. モビリティチームではどんな研究をしていますか?
A. モビリティチームでは,主に移動するものとの通信について研究しています.
例えば,動いているものにアンテナを載せたときに,どうすれば安定して通信できるのかを考えます.
通信相手が動くと,電波の届き方や通信品質も変わります.
このチームでは,そのような環境でもうまく通信できる方法を検討しています.
ざっくり言うと,
「車!衛星!電車!ドローン!通信!」
みたいなチームです.🚗🛰️🚃
勢いがあります.研究内容もなかなかアクティブです.
Q6. モビリティチームの特徴は何ですか?
A. モビリティチームの特徴は,研究対象をイメージしやすいところです.
車や衛星,電車など,身近だったりスケールが大きかったりするものを扱うため,
「実際に使われたらこんな感じかな」
と想像しながら研究を進めやすいです.
また,通信そのものだけでなく,通信を利用したシステムや応用について考えることもあります.
そのため,通信を軸にしつつ,少し広い視点で研究できるチームです.
チームの雰囲気としては,フットワークが軽い人が多いです.
これもモビリティの一種かもしれません.
Q7. モビリティチームに向いている人は?
A. モビリティチームは,次のような人に向いていると思います.
・自動車,衛星,鉄道,ドローンなどに興味がある人
・実際の環境をイメージしながら研究したい人
・システムを触ることにわくわくできる人
・通信の応用にも興味がある人
・多少複雑な環境でも「面白そう」と思える人
研究テーマによっては,扱うシステムや環境が少し複雑になることもあります.
しかし,その分,実際の社会で使われる技術に近い感覚で研究できるところが魅力です.
乗り物が好きな人には,なかなか刺さるチームだと思います.
Q8. AI/MLチームではどんな研究をしていますか?
A. AI/MLチームでは,通信システムにAIや機械学習を適用する研究をしています.
通信の世界にも,AIを使える場面はたくさんあります.
例えば,通信環境を推定したり,信号を分類したり,通信制御を効率化したりすることが考えられます.
このチームでは,AIを使うことで,通信性能の改善や計算量の低減を目指しています.
つまり,通信にAIの力を借りて,
「もうちょっと賢くできない?」
と考えるチームです.🤖
AIが全部なんとかしてくれるわけではありません.
むしろ,人間がかなり頑張ります.
Q9. AI/MLチームの特徴は何ですか?
A. AI/MLチームの特徴は,通信分野の課題に対して,情報系の技術を使ってアプローチするところです.
通信の知識に加えて,機械学習,データ処理,プログラミングなども関わってきます.
Pythonを使って実装したり,データを作ったり,学習結果を見たりする機会も多いです.
AIは便利ですが,いつも思い通りに動いてくれるわけではありません.
むしろ,最初はだいたい思い通りにいきません.
「なぜ学習しないのか」
「データが悪いのか」
「モデルが悪いのか」
「もしかして自分が悪いのか」
と考えながら,少しずつ改善していくチームです.
最後の問いは,あまり深追いしすぎないことも大切です.
Q10. AI/MLチームに向いている人は?
A. AI/MLチームは,次のような人に向いていると思います.
・AIや機械学習に興味がある人
・Pythonなどのプログラミングに興味がある人
・データを扱うことが好きな人
・新しい技術を勉強するのが好きな人
・うまくいかなくても試行錯誤できる人
・エラー文と仲良くなれる人
AIを使った研究では,すぐに良い結果が出るとは限りません.
しかし,条件を変えたり,モデルを工夫したりしながら改善していく面白さがあります.
「通信にAIを使ったら何ができるんだろう?」と考えるのが好きな人には,ぴったりのチームです.
エラー文が赤くても,心まで赤く染まらない人におすすめです.
おわりに
今回は,研究室の3つの研究チームである,暗号チーム,モビリティチーム,AI/MLチームについて紹介しました!
それぞれ研究内容や雰囲気は異なりますが,どのチームも通信技術をより良くするために,日々試行錯誤しながら研究に取り組んでいます.
研究テーマを聞くと少し難しそうに感じるかもしれませんが,最初はみんな分からないところからのスタートです.
先生や先輩,同期と相談しながら少しずつ理解を深めていくことで,自分の研究として楽しめるようになっていくと思います!
この記事を通して,B4の皆さんや,将来本研究室に興味を持ってくれる方に,研究室の雰囲気が少しでも伝わっていれば嬉しいです😊
今後も,研究の様子や研究室の日常について発信していきますので,ぜひお楽しみに!🎉




 昨年はM2
昨年はM2





















 基礎ゼミ発表会の様子
基礎ゼミ発表会の様子




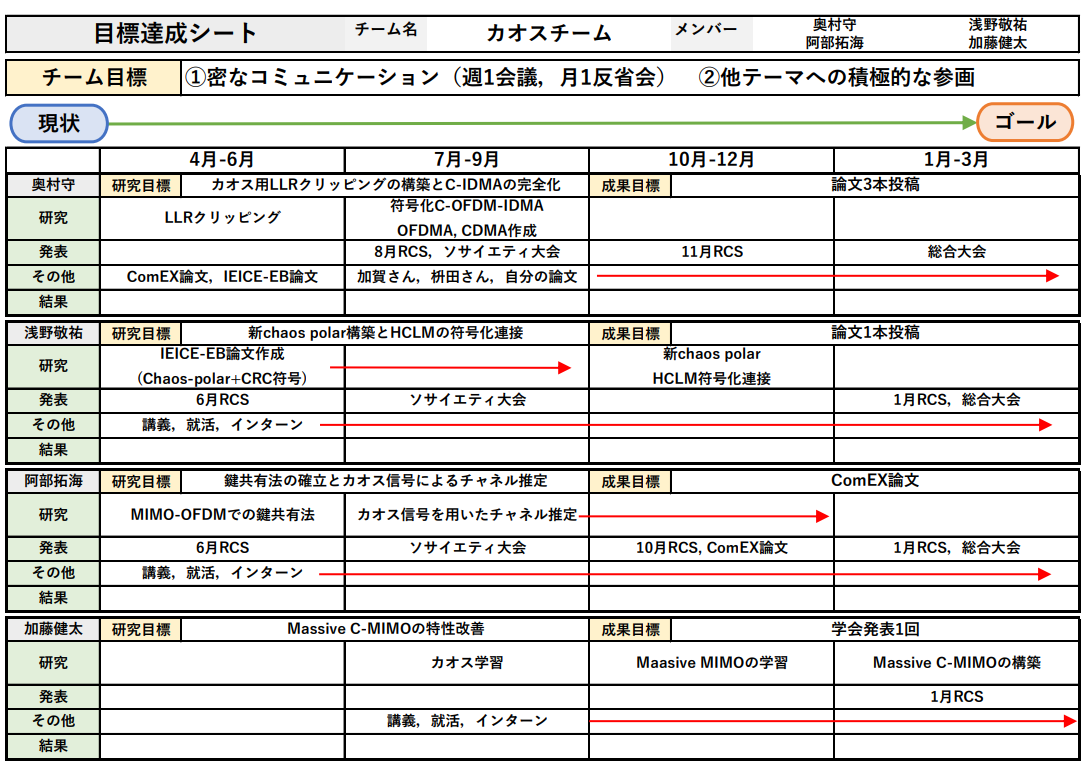 【目標管理シート】
【目標管理シート】 【チーム会議】
【チーム会議】 【チームリーダーにインタビュー】
【チームリーダーにインタビュー】